My last post looked at how driverless cars will benefit the disabled. This post looks their wider benefits.
Driverless cars will be ideally suited to small cities and towns. They will permit a fast low energy transport system without the heavy investment required to build a subway, a tram system, or new roads.
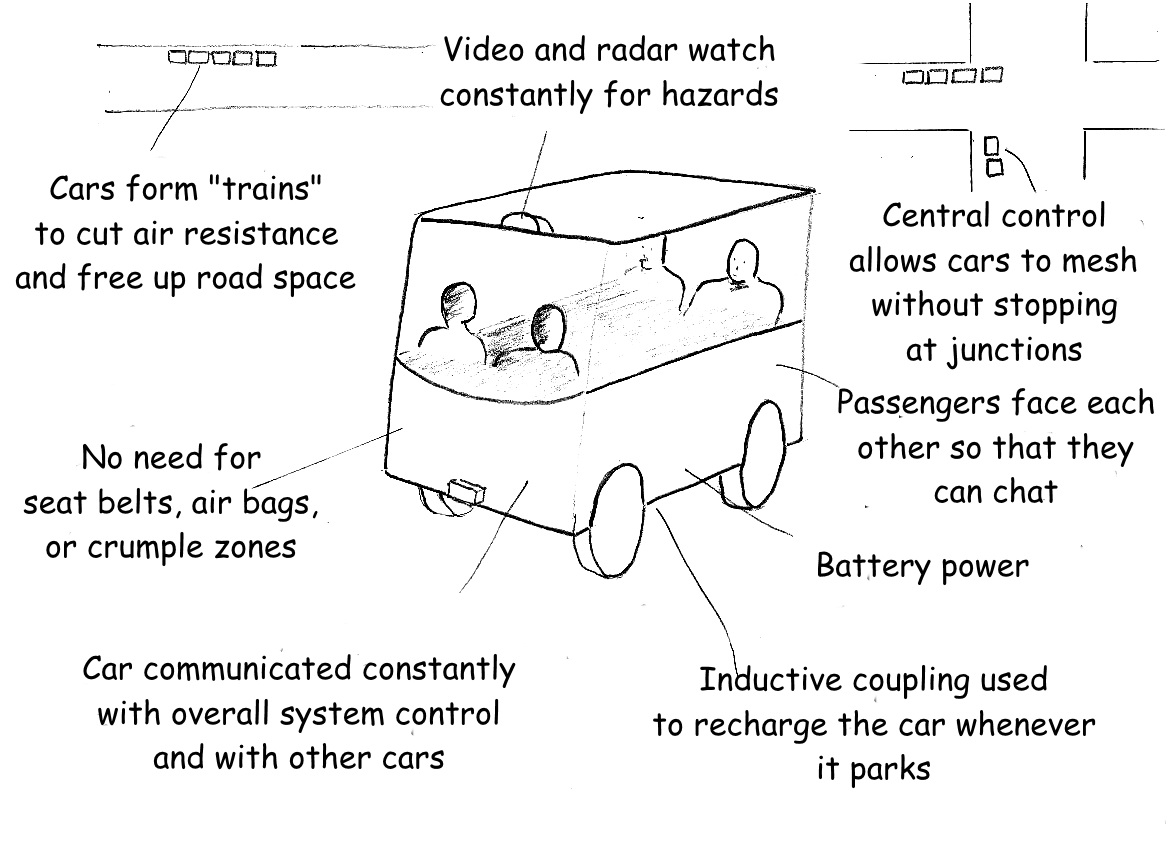
Most cars will be owned by the local community and will be picked up from parking areas when needed. Electronic personal assistants will show users where the nearest available car is parked. The battery powered cars will be recharged when they are parked via inductive loops in the road. There will be no need for wires to be connected. If a car does not have adequate charge for the requested journey the user will be directed to another. The frequent charging points will mean that a large battery is not required, reducing weight and the resources involved in battery manufacture.
The cars will be activated by voice, keypad, or card. Electronic personal assistants will also be able to direct the cars. Customers will be automatically charged for each journey.
Privately owned cars will also have a self-drive capability by 2050, which will be used when they are in towns.
The cars will travel relatively slowly in town, but nevertheless journey times will be shorter than existing cars because they will talk to a central computer and, for example, select their route and schedule their arrival at junctions so that they do not need to stop. A further speed benefit is that there will be no need to waste time seeking a parking spot.
Once they are underway they will be able to group together to form trains, so that they take less road space in towns and have lower wind resistance, just like road racing cycles. They will be able to do this because they will communicate, telling each other of hazards ahead. Each car will be continually monitored and will be taken out of service at the first warning of any fault.
Accidents will be rare. The sensors on these cars will never tire or be distracted. They will detect cyclists and pedestrians and take action to avoid them if required. The cars will always drive at a safe speed. They will talk to each other to avoid misunderstandings.
Cars will be lightweight with no need for seat belts, airbags, or crumple zones because accidents will be so rare. Engines will be relatively small because the cars rarely need to accelerate and because the lightweight cars will not need much power to climb hills. There will be no need for a steering wheel, dashboard, windscreen wipers and mirrors.
Inside the car arrangements will vary depending on design. I think it would be good if the seats face each other, as shown. Each seat could then be folded up allowing the car to transport wheelchair users, baby buggies, or large items. Parents will be better able to supervise their children if they sit facing them.
Parking in town centres will be much easier because each car will be shorter, and because cars will not be left parked while their owners work or shop. They will be taken by another user, or driven empty out of the town centre to wait and recharge elsewhere.
If new road space is required it can be found by making lanes narrower because these cars will drive very accurately. If necessary additional small flyovers or tunnels could be built for these cars only. Using these techniques it will be possible to provide faster journey times while increasing the volume of people carried.
The system will permit a higher standard of life for the blind, for people with other disabilities, for the elderly, for those who cannot afford a car, and for those too young to be able to drive. It will also eliminate noise and pollution from town centres, producing health benefits.
They will use less energy than existing cars because they will be lighter, will need to accelerate far less frequently, and will use electrical power rather than a fossil fuelled engine.
Much larger energy savings will come indirectly. Far fewer cars will be needed, cutting down resources used for their manufacture. The system will link well with trains, making public transport much more convenient and increasing its use.
Why can’t this be done now? The basic self driving technology is under development by Google and others. Advanced batteries already exist that could give these cars an adequate range for use in cities. The ULTRA system, in service in the UK, shows some of these attributes though it operates on a dedicated track.
There are some serious barriers to overcome before the widespread use depicted here is possible. For example cars that lack accident defences cannot easily be used alongside cars or lorries that are under conventional human control. Initial application may need to be in already pedestrianized areas, in dedicated lanes on existing roads, or on new flyovers. Alternatively these vehicles could retain some accident defences initially. Wider use may need to wait until self-driving capability is commonplace, perhaps around 2030.
Insurance is also a key issue – deciding who is at fault if there is an accident. This question is being discussed in the USA at present. Ultimately however these cars should be easier to insure than a human driver because accidents will be rarer.

